カシオ計算機は、国立研究開発法人宇宙航空研究開発機構(以下、JAXA)と共同で、宇宙探査における研究テーマとして、同社独自の「カメラ可視光通信」を使った高精度位置測位システム『picalico(ピカリコ)』による測位実験を、本日から12月3日にかけてサーティーフォー相模原球場にて実施すると発表した。
同社は、LED灯の発光色を変化させて信号を送信する独自の「カメラ可視光通信」を使い、主に工場の自動搬送機や台車、倉庫のフォークリフトなど作業動線の分析や所在管理に活用できる高精度の位置測位システムとして『picalico』を開発し、2019年3月より提供を開始している。
一方でJAXAは、2030年代以降、月面にインフラを構築し、持続的な探査を目指す構想を掲げているという。
当面は月に衛星測位システム(GNSS)がないことを想定し、カメラとLED灯を使って月面を移動する月面探査車等の位置を正確に把握する技術の研究テーマとして、同社より提案した『picalico』を活用して共同研究を実施。
JAXAで宇宙探査の本研究テーマを統括する牧 謙一郎氏は、「広大かつ特徴が少ない月面上では、無人/有人の移動車が自己の位置を把握しながら移動することは、資源探査や基地建設などのあらゆる活動において有効となる」と、今回の実証実験で得られる成果に期待を寄せているとのことだ。
今回の実験では、野球場を月のクレーターに、フィールドを移動するトラクターを月面探査車に見立てて行う。
産業用カメラをトラクターに設置し、観客席に設置した複数のLED灯から送信する可視光通信の信号を捉えて、それらから算出する位置情報データの精度を確認するとのことだ。
なお、実験は一般には非公開で行われるが、JAXA宇宙探査イノベーションハブのTwitter(@JAXA_TansaX)で実験の模様が投稿されるとのことだ。

<今回の実験までの経緯>
同社は、JAXAの宇宙探査イノベーションハブが実施した「第6回研究提案募集(2020年6月1日~7月10日実施)」において、自動制御のための位置計測・推定技術および自動・自律型探査技術として「カメラ可視光通信を用いた非GNSS利用広域高精度測位」を提案し、課題解決型の共同研究テーマとして採択されたという。
<JAXA宇宙探査イノベーションハブ>
JAXA宇宙探査イノベーションハブでは、月・火星での探査活動に資する技術の創出を、地上における技術課題解決と融合させ、産業界や大学との共同研究を通じて、革新的な技術の開発を行い、得られた成果を宇宙利用のみならず地上で社会実装すること(Dual Utilization)を目的としている。
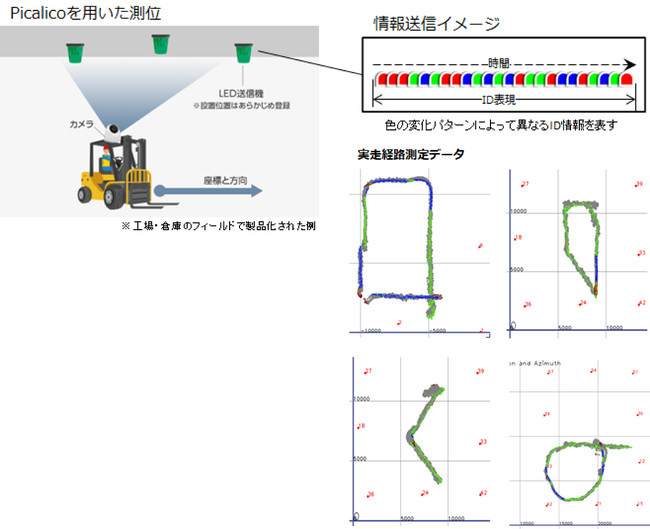
<『picalico』の仕組み>
LED灯の発光色を変化させて、信号を送信する独自の可視光通信を使用。信号は、3色(赤・緑・青)の発光色を24回または12回切り替える色変化のパターンで構成され、そのパターンがひとつのID情報となる。
フォークリフトなどの現在位置を測位するには、車体に搭載したカメラで天井や壁に設置した複数のLED灯を撮影し、ID情報を受信。それぞれのID情報に紐づけられた座標をもとに、現在位置を算出するとのことだ。
なお、信号として送信する色変化のパターンは1,062,882通りの組み合わせができるほか、カメラ1台で最大100個の信号を同時に受信することが可能であるとしている。