
パナソニックHD、自律走行ロボットの走行経路を効率的に計画するAI技術を開発 多様なロボットが共存する環境での活用拡大に期待
パナソニック ホールディングス(以下、パナソニックHD)は、人や他のロボットが共存する環境下でもロボットの効率的な走行経路を計画できる技術を開発したことを発表した。
同技術は、屋内などの限られたスペースで人と多種・複数のロボットが共存する環境における自律走行ロボットの活用シーンを広げる技術として期待されるとのことだ。
なお、同技術は問題設定と先進性が国際的に認められ、マルチエージェント技術のトップカンファレンスであるAAMAS 2023(The 22nd International Conference on Autonomous Agents and Multiagent Systems)に採択されたとのことだ。
技術の内容:
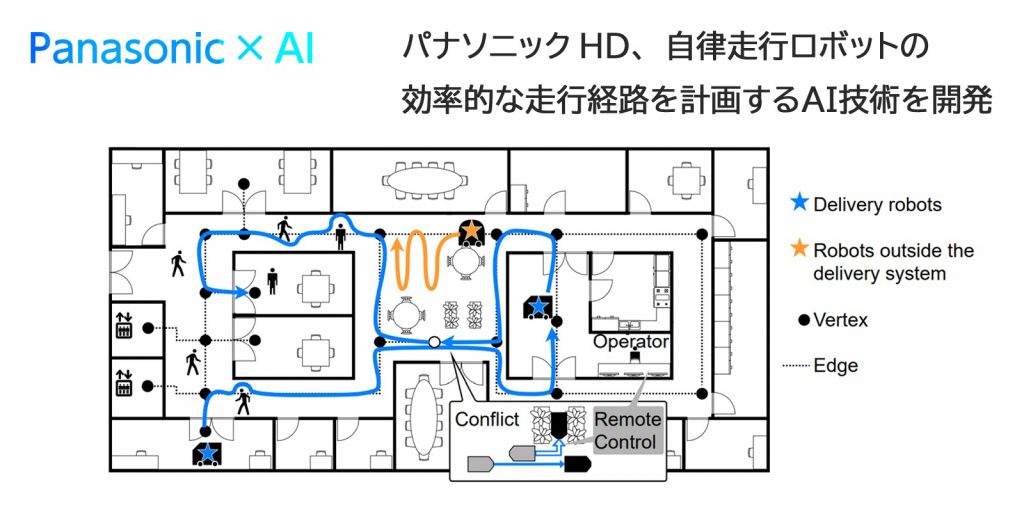
自律走行ロボットが労働力不足に貢献できると見込まれるユースケースのうち、ビル内の通路など、自律走行ロボット同士がすれ違えないほどの狭い通路が含まれる例は少なくない。さらに、多くの場合、通路には通行人や別のシステムの制御下にある多種・複数のロボットが存在しているという。

このような環境下で、自律走行ロボットが移動障害物を回避する際に減速や一時停止を繰り返すと、ロボットが通路を通過するのにかかる時間に確率的に変動する遅延が発生。
この遅延の確率分布が事前に分かっていることは少なく、実際は不明、あるいは限られた事前情報しか得られない場合が多いため、ロボットの走行中に観測された遅延をもとに次の計画を作成することになる。
これまで、MAPF(Multi-agent Path Finding)という、グリッド状のグラフ上で複数ロボットが衝突しない経路を作成する問題設定が研究・応用されてきたが、従来の手法では遅延の確率分布を正確にモデル化できていることが前提となっており、通路にいる人やロボットの数が変動する、実際の暮らしや仕事の現場に適用することは困難だったという。
そこで、パナソニックHDは、ロボットが特定の経路を走行する際の遅延をパラメータが未知なガンマ分布に従うものと定義し、走行中に得られる遅延の観測値を用いて確率分布のパラメータをベイズ推論で遅延が観測されるたびに更新することで、推定したパラメータに基づき最適な走行経路計画を作成する手法を開発。
同手法は、シミュレーション実験の結果、従来法よりもロボット同士の鉢合わせを約半分に減らし、目的地までの移動時間が短い走行経路を計画できることを実証したとのことだ。

今回開発した自律走行ロボットの経路探索技術は、これまで適用が難しかった人と複数の多様なロボットが共存する環境における自律走行ロボットの活用シーンを広げる技術だという。
パナソニックHDは今後も、AIの社会実装を加速し、利用者の暮らしや仕事現場への役立ちに貢献するAI技術の研究・開発を推進していくとのことだ。