
凸版印刷は、国立大学法人東京農工大学と、複数のロボットの行動を最適化するアルゴリズムに関する共同研究を開始すると発表した。
同共同研究では、人とロボットの協働を目指し、マルチエージェントシステムを活用して、複数の自律的なロボットをAIカメラや各種センサー、スマートフォンと連携させ、人の行動を予測するだけでなく、様々な状況の変化にも対応させる技術を確立するとのことだ。


凸版印刷は、東京農工大との共同研究を通じて、ロボットとAIの活用を推進し、物流・小売・スマートシティなどの領域で、人・ロボット・AIが協働できる社会を実現するとしている。
■共同研究の概要
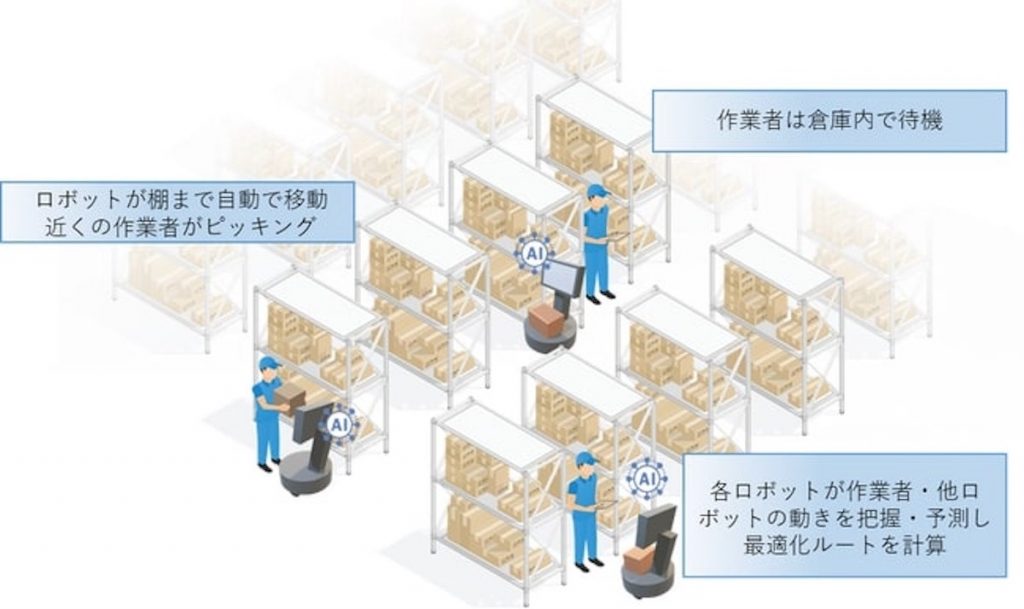
同共同研究では、物流倉庫でのピッキング作業における、人の動きを考慮した自動搬送ロボット(AMR)の搬送経路の最適化を目的とするAI技術に関する研究開発を行うという。
(1)ロボットとエッジデバイス用AIの開発
AMRやスマートフォンなどの各システム上で動作するAIを開発。これにより、複数のAMRやエッジデバイス間で共有した様々な情報を利用して、各AMRが自律的に環境と状況を判断し、最適なルートをリアルタイムに動作することが可能に。
(2)ピッキング倉庫における実証
物流倉庫におけるピッキング業務の省人化・省力化を目標に、(1)で開発したAIを活用したモデルラインを構築し、技術検証を実施。
また、作業者が業務開始前に(1)を用いて様々な条件でピッキング作業をシミュレートし、作業計画を策定する補助ツールとしての利便性についても検証。