
GITAI、トヨタ「有人与圧ローバ」向けロボットアームの試作機を公開 月面でのタスク性能と移動性能を実現
宇宙用汎用作業ロボットを開発するGITAI Japan(以下、GITAI)は、トヨタ自動車(以下、トヨタ)と、トヨタが進める月面でのモビリティ「有人与圧ローバ:愛称「LUNAR CRUISER(ルナ・クルーザー)」向けロボットアームの研究・開発を共同で進めていくことで合意し、2021年6月25日に共同研究契約を締結。
同共同研究契約に基づき、トヨタ有人与圧ローバ向けロボットアームのブレッドボードモデル(BBM)の研究・開発に着手し、開発中の試作機を公開した。
月面において想定される探査、点検、メンテナンス等の様々な用途で活用できるロボットを実現する上での課題として、複数の仕事を実施することが可能な「タスク性能」、広範囲に仕事を行うことが可能な「移動性能」があげられるという。
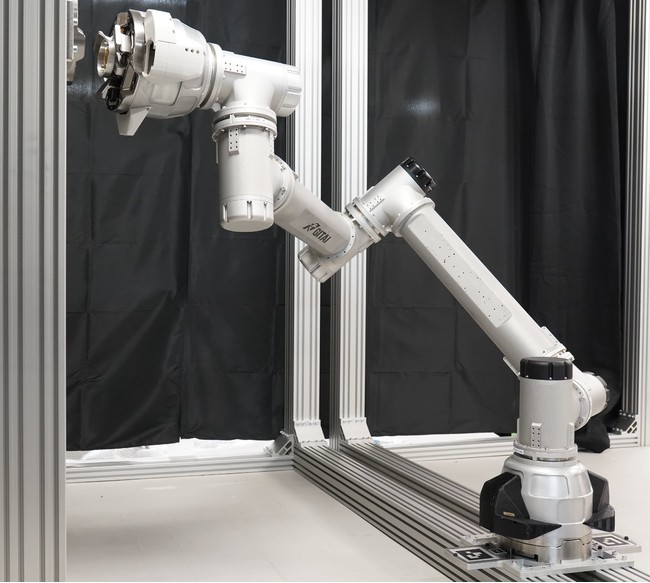
この二つの課題を解決可能なロボットとして、グラップルエンドエフェクタ(※)を両端に搭載したロボットアームと、様々なエンドエフェクタ・ツールやローバ壁面に取り付け可能なグラップルフィクスチャ(※)を研究・開発しているとのことだ。

■月面で複数の仕事を実施することが可能な「タスク性能」の実現について
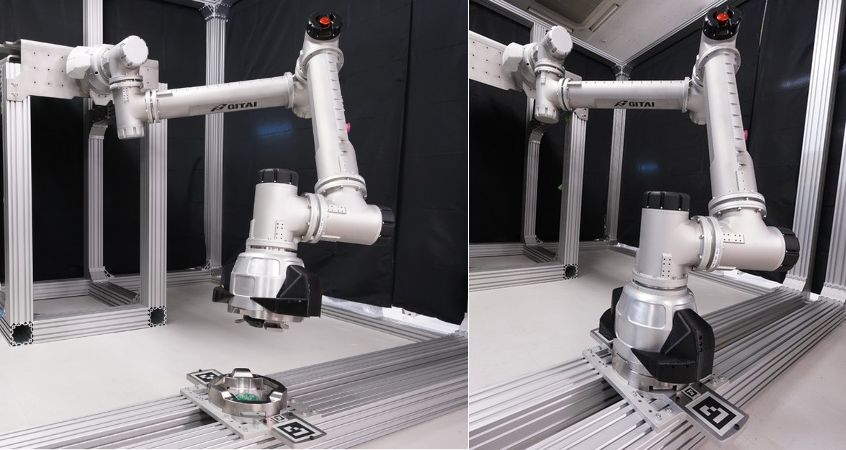
GITAIが開発するグラップルエンドエフェクタは可動する爪を有し、グラップルフィクスチャと嵌合することが可能だという。また、グラップルフィクスチャは様々なエンドエフェクタ、ツールやローバ壁面に取り付けることが可能とのことだ。
グラップルエンドエフェクタは、グラップルフィクスチャと嵌合した際に機械結合、電力結合、通信結合の機能を備え、エンドエフェクタ・ツールなどを操作することができ、その結果1台のロボットアームに対し様々なエンドエフェクタやツールを切り替えることで、複数の仕事を実施することが可能な「タスク性能」を実現しているという。
■月面で広範囲に仕事を行うことが可能な「移動性能」の実現について
GITAIが開発するグラップルエンドエフェクタを両端に搭載したロボットアームは、ローバ壁面に設置されたグラップルフィクスチャと嵌合することで、ローバ上を自由に移動することも可能とし、さらにグラップルフィクスチャを建造物などに設置することでロボットアームの移動範囲を上下左右と無限に広げることができるという。
なお、グラップルフィクスチャに充電機能を備えることで、ロボットアームは移動しながらの充電が可能に。その結果、GITAIのロボットアームは広範囲にて仕事を行うことが可能な「移動性能」を実現しているとのことだ。
GITAIとトヨタは2029年の有人与圧ローバの月面への打ち上げを目指し、今後更なるトヨタ有人与圧ローバ向けロボットアームの研究・開発を進めていくという。
具体的には、複数かつ広範囲に作業を実施するための自律制御技術、低重力・真空・極低温~高温・レゴリスと言った月面特有の砂や激しい放射線など超過酷環境への対応等の取り組みを実施。
なお、GITAIとトヨタを中心として、チームジャパン勉強会(JAXA、三菱重工、トヨタが幹事会社を務める)参加の他の企業様との連携も見据えた同共同研究は、有人与圧ローバへの搭載だけでなく、将来の月面社会/月面基地での様々な活動における汎用的なロボットシステムを目指していくとのことだ。
(※)グラップルエンドエフェクタ/グラップルフィクスチャ:ロボットアームの手先を交換(着脱)可能にするためのインターフェース