

ゼンリンは、タクシーをはじめとするモビリティ関連事業を展開しているMobility Technologies(以下、MoT)と提携することを発表した。


この提携により、ゼンリンが展開するナビゲーションシステムや自動運転時に使用される地図情報のメンテナンス効率化に向けて、道路情報の自動差分抽出の共同開発を行うという。
具体的には、道路の建設や交通標識の新設・変更、路面ペイントや信号機の情報など、道路情報の変化に対応し、正確な地図情報を提供するために必須となる地図情報のメンテナンスをより効率化するとのことだ。

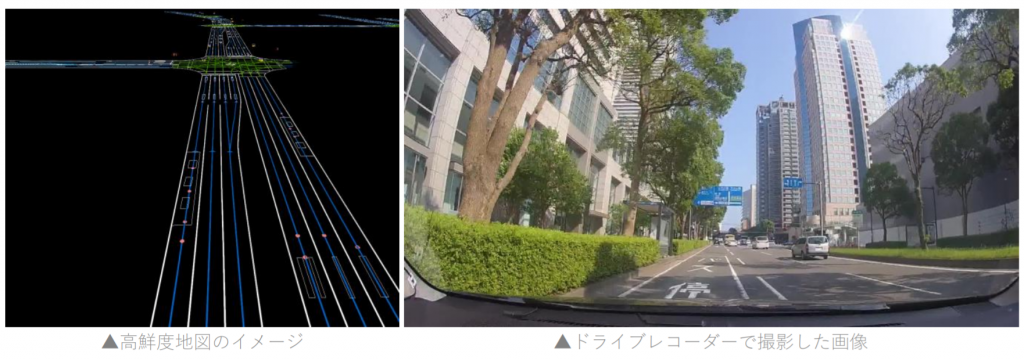
MoTが日々運行を行うタクシーやトラックに設置されたドライブレコーダーから映像データを取得。機械学習により、既存の地図情報と実際の道路情報の差分を抽出する。
また、この変化情報をゼンリンが活用し、時空間データベースとして逐次メンテナンスを行うという。これにより、高鮮度な地図情報の提供が可能となるとしている。
両社は、今後幅広い分野で連携を強化し、安心・安全で便利な交通社会の実現に貢献するとのことだ。