
自動運転、次なる舞台は「水上」。アムステルダムで進められる「Roboat」プロジェクト
INDEX
2000年代に入ってから急速に開発が進んだ技術のなかに自律した自動運転がある。マシーン自らが考え運転する技術は、移動手段、工場など人の操作が必須だと思われた領域に広がり、実証実験から実装へのフェーズに入りつつある。
車の自動運転はまだ実用化はされていないものの、トヨタ、フォード、ダイムラーなどメジャーやGoogleなどの異業種も参入、各社がこぞってしのぎを削っており、運転席に人がいない車を道路を見ることはそう遠い将来ではないだろう。
空の自動運転、ドローンにいたってはすでに空撮、報道、監視、測量など様々なシーンで活用されている。
自動運転技術は、もっぱら地上・空での移動手段に注目が集まっているが、もうひとつ実験が行われている場所がある。それは「水上」である。
現代に生きる私たちは、鉄道、車、飛行機だけが移動手段だと思いがちだが、ほんの数百年前までは、水上も重要な交通手段だった。日本もしかり、バンコクなどでは今でも水上交通が多いに活用されている。
水上自動運転の実証実験に最適なアムステルダム
最新の技術を用いて、水上自動運転の技術開発に取り組んでいるのが、オランダのアムステルダムである。オランダは国土の4分の1近くが水面下にあり、国の歴史は、干拓・治水の歴史だったといえる。
最大の都市であるアムステルダムも面積の25%が水面であり、ユネスコ世界遺産にも登録されている中心部の環状運河地区をはじめ、実に165の運河が街に張り巡らされている。
運河沿いにはカナルハウス(間口が狭く、奥行きのある家)がぎっしりと立ち並び、その家々の上部には運河に向かって棒が突き出ている。その棒は、その昔、船の積み荷の上げ下ろしに使われていた(今でも引っ越しなどに使われている)。
また、観光客が楽しむ運河クルーズのみならず、夏になると、甲板に椅子を置いてまるで自宅の居間にいるかのように寛ぎながらボートを操作する人々もよく見かける。

アムステルダム市街 Wikipediaより
このように水との親和性が高い国なので、自動運転の舞台に水上が選ばれるのも自然の流れだろう。また市内の道幅が狭いこと、近年のオーバーツーリズム、人口増加による公共交通機関の利用過多という一面も後押ししている。
リサーチプロジェクトRoboat
このプロジェクトの名前は、ロボットとボートをひっかけて「Roboat」。オランダの研究機関AMS Instituteと米マサチューセッツ工科大学(MIT)のジョイントリサーチとして、5年計画でローンチした。

東京でもプロトタイプで実験が行われた。 写真提供:http://roboat.org/
ボートには動力はもちろんのこと、マイクロコントローラ、GPSモジュールなどが搭載されている。2016年にMITが前後、横に動けるプロトタイプを開発、翌年、3Dプリンタによる実物4分の1のRoboatを設計、AIカメラと対象物の認識・距離を測定する光センサー技術LiDARを搭載した。
1秒に30万以上のポイントから情報を収集して精密な3Dマップを構成、高度な軌道追跡アルゴリズムによって障害物にぶつかることなく、航行ができるようになった。
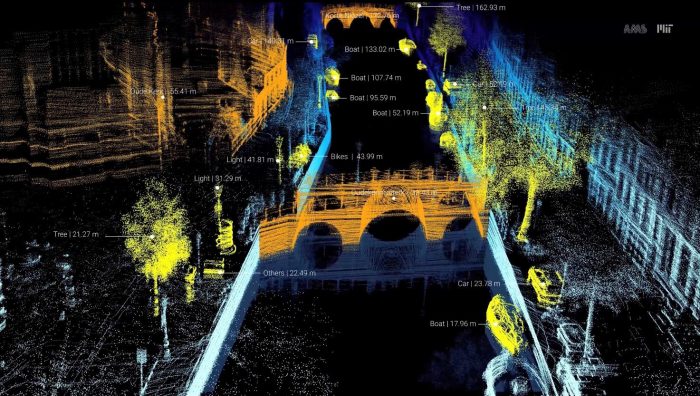
LiDAR技術のレーザーによって再現された運河の風景。写真提供:http://roboat.org/
広がるボートの役割
Roboatプロジェクトのおもしろいところは、人やモノを運ぶ運搬手段以外でもRoboatの活用法を見出していることだ。例えば環境モニタリング。センシング機能を活用して水質の監視したり、収集したデータによってバクテリアを検出して公共衛生に役立てたり、汚染状況を評価することができる。
あるいはゴミ収集車の代替え案。現在、アムステルダムでは縁石に置かれたゴミ収集ボックスに入れるか、決まった日にゴミを出すが、前述したように道が狭いのでゴミ収集車による混雑や騒音などの問題を抱えている。
運河にRoboat機能のあるコンテナを浮かべ、そこにゴミを収集する。コンテナがゴミでいっぱいになればRoboatがそれを検知、廃棄物処理センターに自律的に向かう。Roboatのプロジェクトチームによると、アムステルダムの70%のエリアでこのRoboatによる浮遊コンテナの活用は可能だという。

ゴミ収集のイメージ 写真提供:http://roboat.org/
繋ぐ・離れるシステムでインフラを担う
Roboatの活用法はこれだけでは終わらない。プロジェクトチームはRoboatが自律的にドッキング、切断して、形を自在に組み立てるシステムを開発した。
このRoboat機能を応用した初のアプリケーションは「roundAround」プロジェクトとしてすでに稼働している。roundAboutとはRoboat同士をつないで橋にするというものだ。
アムステルダムの中心街には、大型船舶も航行するため橋を作るのに適さない60m幅の運河がある。その運河にRoboat15隻ほどで円陣を組み、乗客を乗せて対岸に渡らせるようにするという。
橋の建設はコスト高であるだけではなく、開発途上にあるエリアでは周辺が将来どのように変容するか予想するのは難しい。roundAroundプロジェクトは、ボートにとどまらず、水という流動な環境、浮力を活かしたポータブルな近未来型のインフラと言えるだろう。
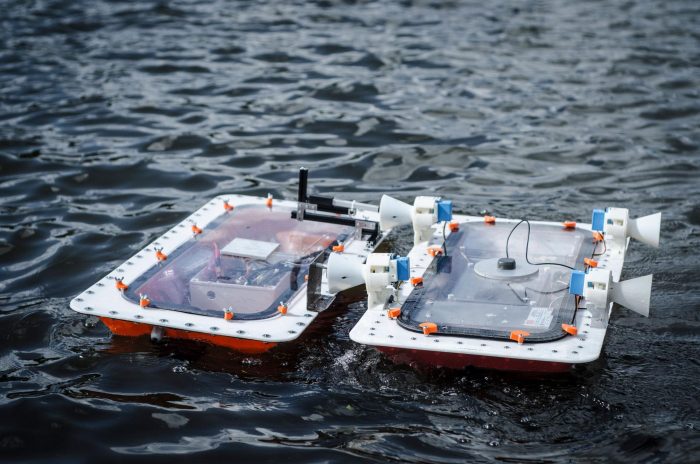
2隻のRoboatをドッキングさせたところ。写真提供:http://roboat.org/

roundAroundプロジェクト。背景の建物はNEMOサイエンス・ミュージアム。
「アムステルダムでの実験は、世界のGDPの80%を占めるデルタ地帯や沿岸地域の参考になるはず」と、AMS InstituteのArjan van Timmeren氏は言う。
17世紀のオランダ黄金期を支えたのは貿易で、その貿易を発展させたのが運河の整備だった。
3世紀後の今、貿易船からAIカメラ、センシング機能搭載のボートにとって代わり、運搬のみならず仮設の水上プラットフォームや移動はしごなど、全く新しいスタイルで運河が活用されるようになるかもしれない。
「運河が街の一部となっているアムステルダムのような場所では、水上でのインフラを整えることで都市機能が向上するはず」と、Roboatチームは自信を見せる。

rroboat同士をつなぎ合わせて仮設ステージを作ることも可能だ。写真提供:http://roboat.org/
文:水迫尚子
編集:岡徳之(Livit)